AutoSar是啥

AUTOSAR 由 OEM 与 Tier-1供应商联合推动,提出了统一的分层架构与接口规范,把 ECU 软件开发从“手工作坊”转变为“工业化装配”。
AUTOSAR 就是Automotive Open System Architecture的简称,是一个汽车行业的开放架构。 它将汽车电子控制单元(ECU)的软件底层做了一个标准的封装。使得大家都能共用一套底层软件,大部分情况下只需要修改其中的一些参数,就可以匹配不同硬件,也可以匹配不同的应用层软件。
早期工程师只需掌握单片机和底层驱动,而今天的整车已包含上百个 ECU、成千上万的信号交互。在这种背景下,AUTOSAR 便成了应对复杂度和保证协作可控的行业共识。对于汽车嵌入式工程师而言,掌握 AUTOSAR 已经是进入主流项目的必修课。
汽车电子正从单一 ECU 走向集中化与高度互联,软件规模和复杂度急剧膨胀,AUTOSAR 对软硬件的解耦,可以使得应用软件不依赖硬件进行开发。
它的计划目标主要有三个:一是建立分层的体系架构;二是为应用程序的开发提供方法论;三是制定各种应用接口规范。
AutoSar 架构描述
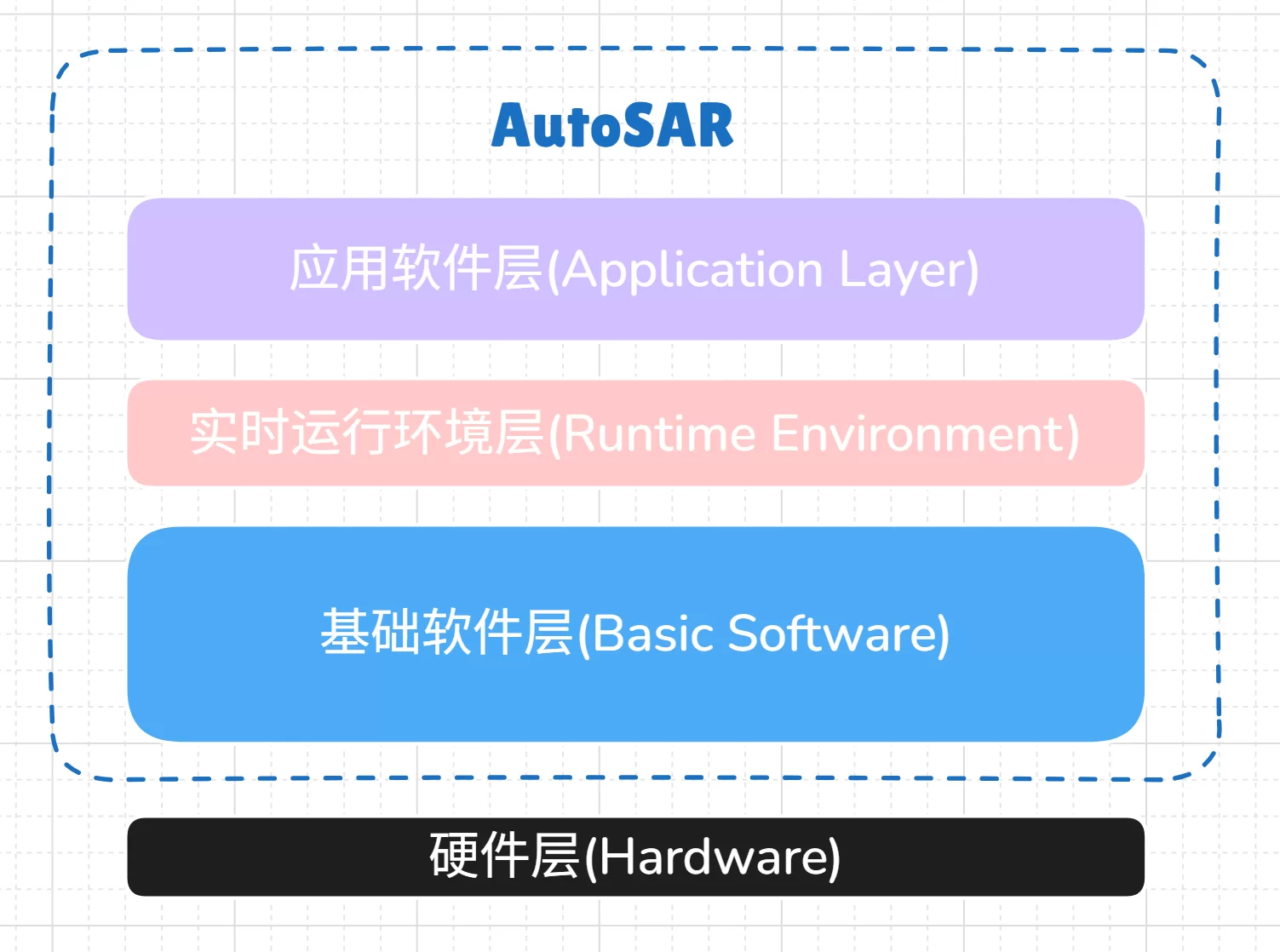
首先就能看出AutoSAR主要分为3个层级:应用软件层(AppL),实时运行环境(RTE)和基础软件层(BSW)
- 应用软件层(Application Layer):执行用户应用层代码的地方
- 实时运行环境层(Runtime Environment):提供应用层所需要的一些资源,同时将应用层和底层分离
- 基础软件层(Basic Software):这一层从图中就可以看出,比其它几层都庞大,它主要是将对硬件的操作封装成统一AutoSAR标准的接口,供上层系统调用,需要将其封装到一个标准操作系统的状态才行
- 硬件层(Hardware):由硬件工程师设计的PCBA
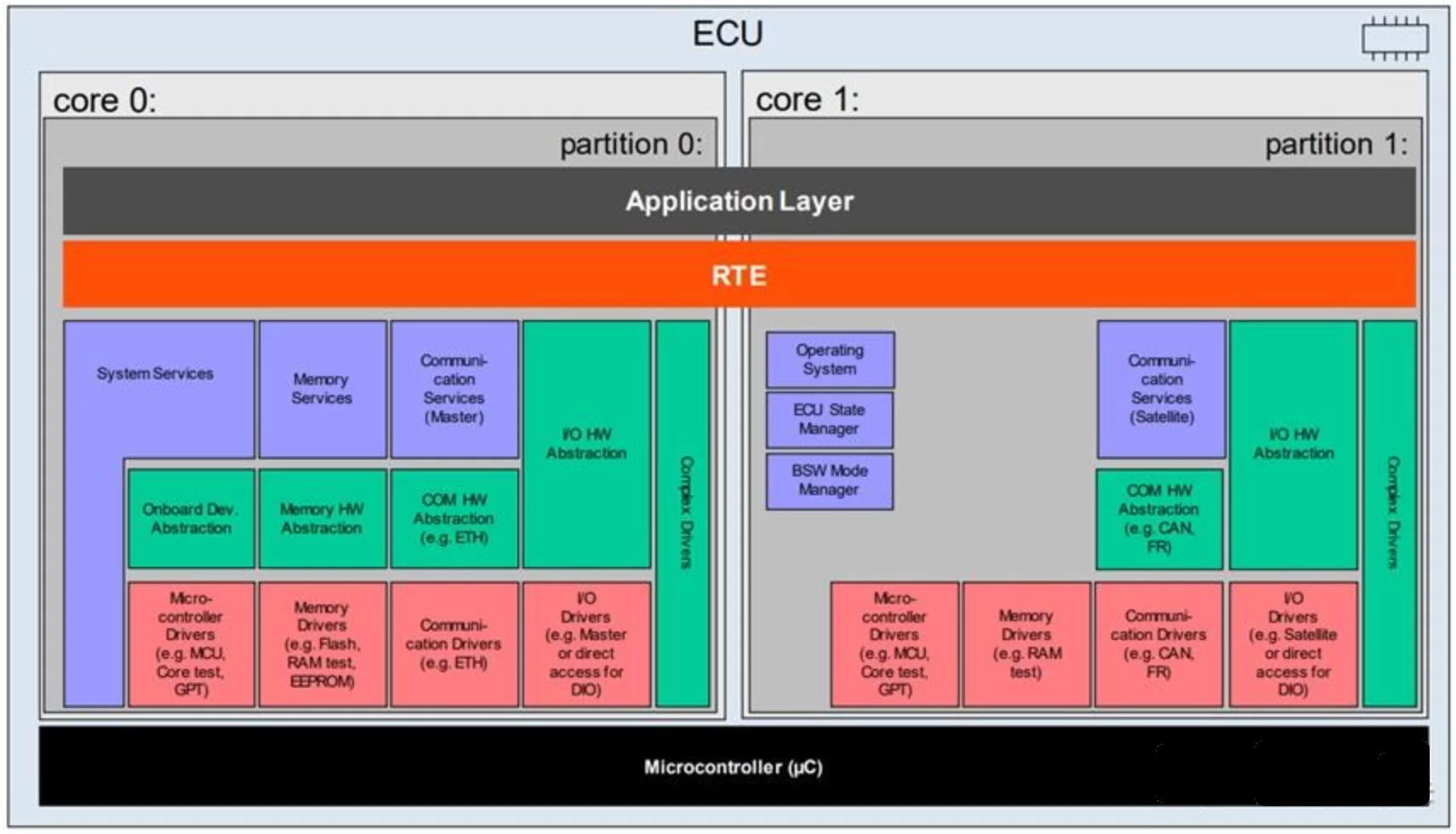
对于双核的处理器,也能够将应用层和底层解耦开。
AutoSAR层级
基础软件层(BSW)
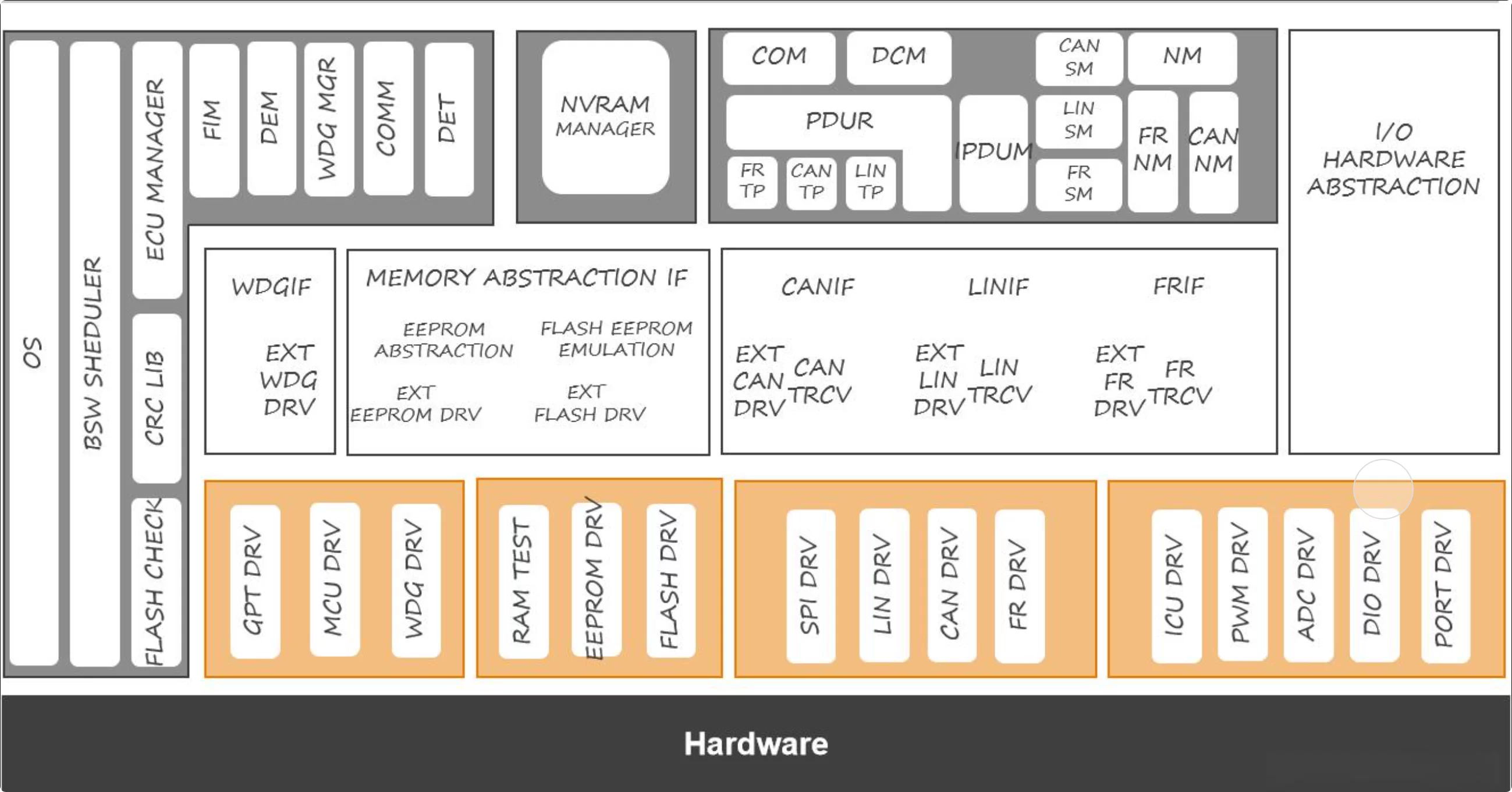
基础软件层又分为四大类,分别是如下描述:
微控制器抽象层(MCAL):就是将芯片的寄存器操作都封装成一个AutoSAR规定的统一的库API。就是说这套API是不同厂商都支持的,但是底层怎么实现,就是芯片厂商的事了。同时也有软件工具EB,可以通过界面配置MCAL功能。
没有什么问题是中间层解决不了的,如果有,那么就再加个中间层。
没错,这玩意像极了STM32的Cube,只不过ST自己做了个上位机配置软件,生成统一代码,然后它提供的各种型号的芯片的Hal库上层是一个统一的API。确切地说,这个Cube是学习的AutoSAR。
ECU抽象层:ECU层实际上是对一个PCBA板子的封装,或者说是功能模块级别的封装,如果说MCAL只封装了芯片,那么ECU抽象层就是将硬件上所有的硬件都进行了封装。
比如我们的控制器上有一个主芯片STM32,还有采样电路,电源电路,CAN电路等等。MCAL就是封装了芯片上有的外设功能。这里的ECU抽象层就是将所有的这些都做一个统一的封装,直接获取到温度,电压,电流信息。
所以,ECU抽象层要做的就是,不管硬件是如何实现的,这里封装后,也形成了统一的API,比如电流采样,不管你是基于霍尔效应的,还是通过采样电阻放大的,亦或是软件偷偷写入的,到这一层都变成了一个电流值。
确切的说,这是一个模型,一个模块的模型,不管你里面乱成什么样,你必须得两个胳膊两条腿,一个脑袋一张嘴。
服务层:这就是是更加高级的一层了,服务层里是包含操作系统的。RTOS将使用ECU抽象层的API再对上层暴露出服务接口,你看,没有什么是中间层解决不了的,刚刚ECU还是单个功能,这里直接把多个功能连在一起凑成了一个服务。
复杂驱动:又叫做CDD,主要工作是将AutoSAR未定义的一些功能封装起来,给应用层提供接口来调用这些功能,如果所有的车都按照定义好的结构来做,那整个汽车市场大概率是千篇一律了,我指的是从电子技术上来说的,抄个保时捷外壳不算在里面。
所以,这个复杂驱动层就是为了灵活创新用的,给一些新东西的加入留个后门。
实时运行环境层
RTE(Run-Time Environment) 是 AutoSar的 ECU架构的核心。它实现了AutoSar VFB(Virtual Functional Bus)的接口,通过AutoSar 提供的基础服务,使得上层应用之间能够进行通信。并充当上层应用访问操作系统和BSW层的中间层。
RTE可以在逻辑上分为两个部件:上层应用的调度,上层应用之间的通信。
这和操作系统是一个逻辑。
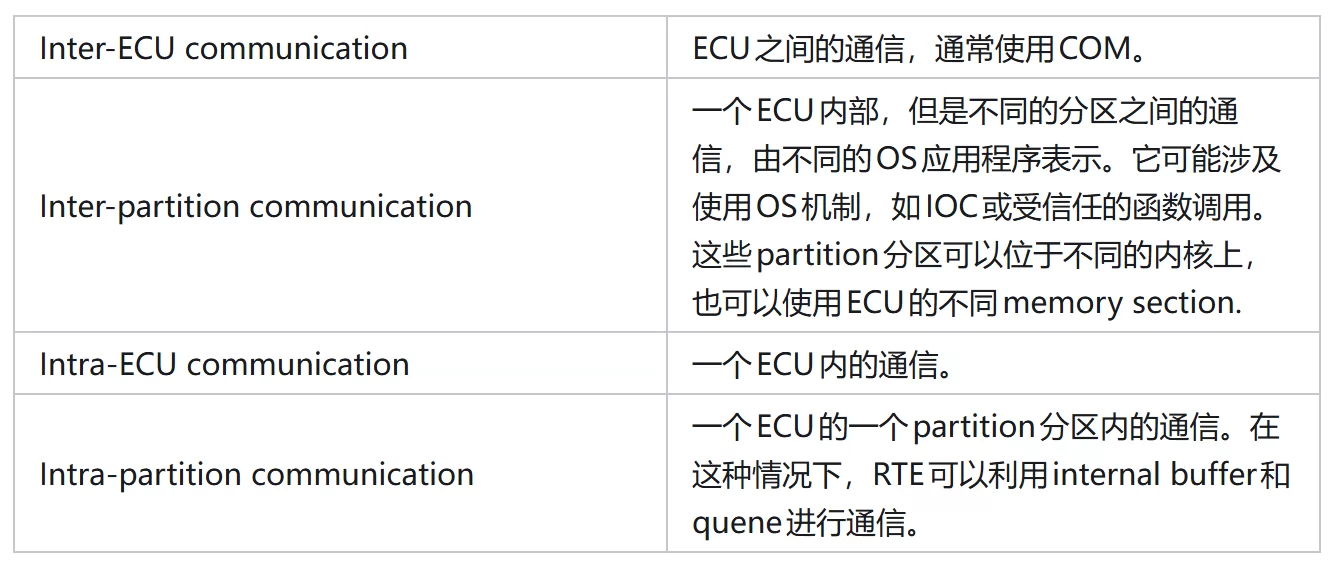
RTE为不同的上层应用之间的通信提供了不同的范例:sender-receiver(消息传递)、client-server(函数调用)、mode switch(模式切换)。
每个通信范例都可以应用到intra-task software component分发、inter-partition software component分发、inter-ECU software component转发。
VFB
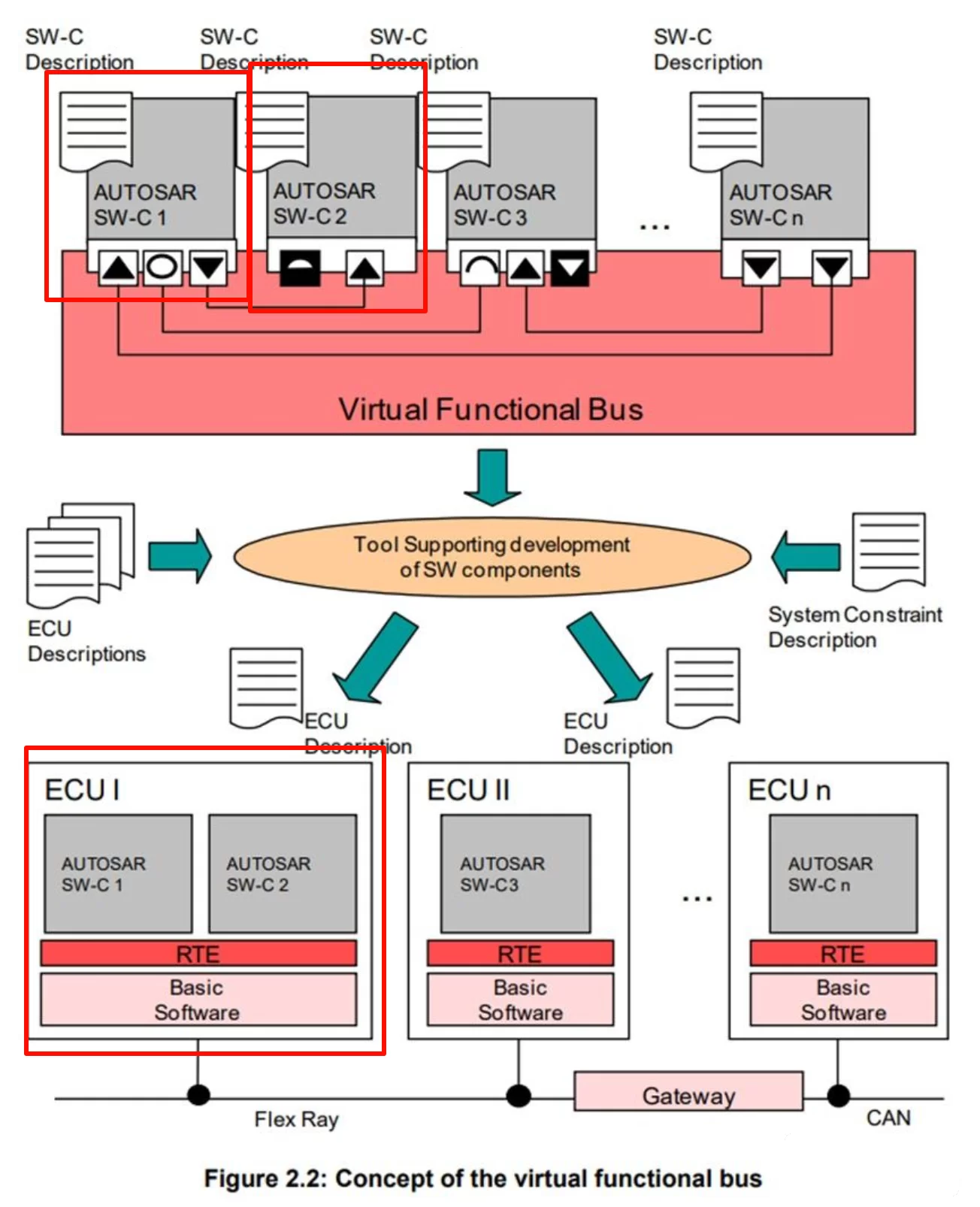
Virtual Functional Bus(虚拟功能总线),在AutoSar中,应用都是互连组件的组成。
在以整车为系统设计时,每个组件会被映射到了特定的ECU,这样就会出现有些组件在不同的ECU内。
这时组件之间的虚拟连接会出现两种情况,被映射到本地连接(同一个ECU内),或者通过网络技术特定的通信机制(例如CAN或FlexRay),映射到不同的ECU上。
VFB 的作用,就是给应用层屏蔽这些通信差异,让应用组件设计时,只感知端口即可。
也就是说,每个应用组件可能在同一个ECU中实现,也可能跨越多个ECU,那么就分成两种通信接口,又出现不同情况了,怎么办呢?
加中间层,都虚拟成对端口的通信,上层只认端口,不认ECU。从下图可以看出,实际上在VFB上面把所有SWC都独立出来,我猜这也是为了方便硬件设计的灵活性。
PortPrototype
AutoSar 规范了软件组件的端口,根据输入/输出方向可分为:
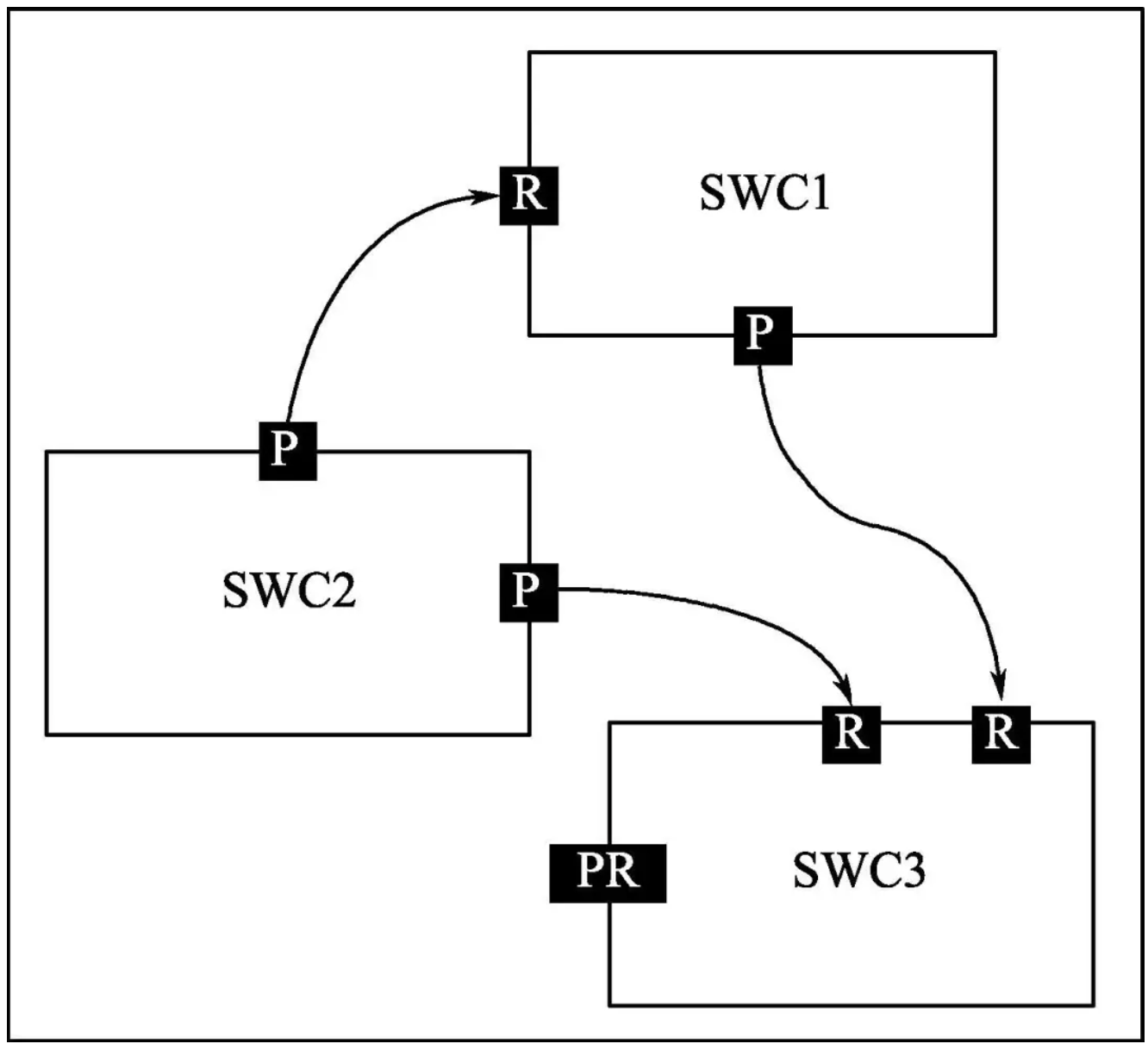
- 需型端口(Require Port,RPort),用于从其他软件组件获取所需数据或者请求的操作;
- 供型端口(Provide Port,PPort),用于对外提供某种数据或者某类操作;
- 供需端口(Provide and Require Port,PRPort),兼有需型与供型两种端口的特性。
所谓的供需,可以理解为发送和接受,P 是发送者,R 是接受者。由于端口仅仅定义了方向,在 AutoSar 中,端口的属性则用端口接口(Port Interface)来表征。
那么,在端口接口类型上主要有以下几种类型:
- 发送者–接收者接口(Sender–Receiver Interface);
- 客户端–服务器接口(Client–Server Interface);
- 模式转换接口(Mode Switch Interface);
- 非易失性数据接口(Non-volatile Data Interface);
- 参数接口(Parameter Interface);
- 触发接口(Trigger Interface);
以上端口接口类型中,最为常用的端口接口是发送者–接收者接口(Sender–Receiver Interface)和客户端–服务器接口(Client–Server Interface)。
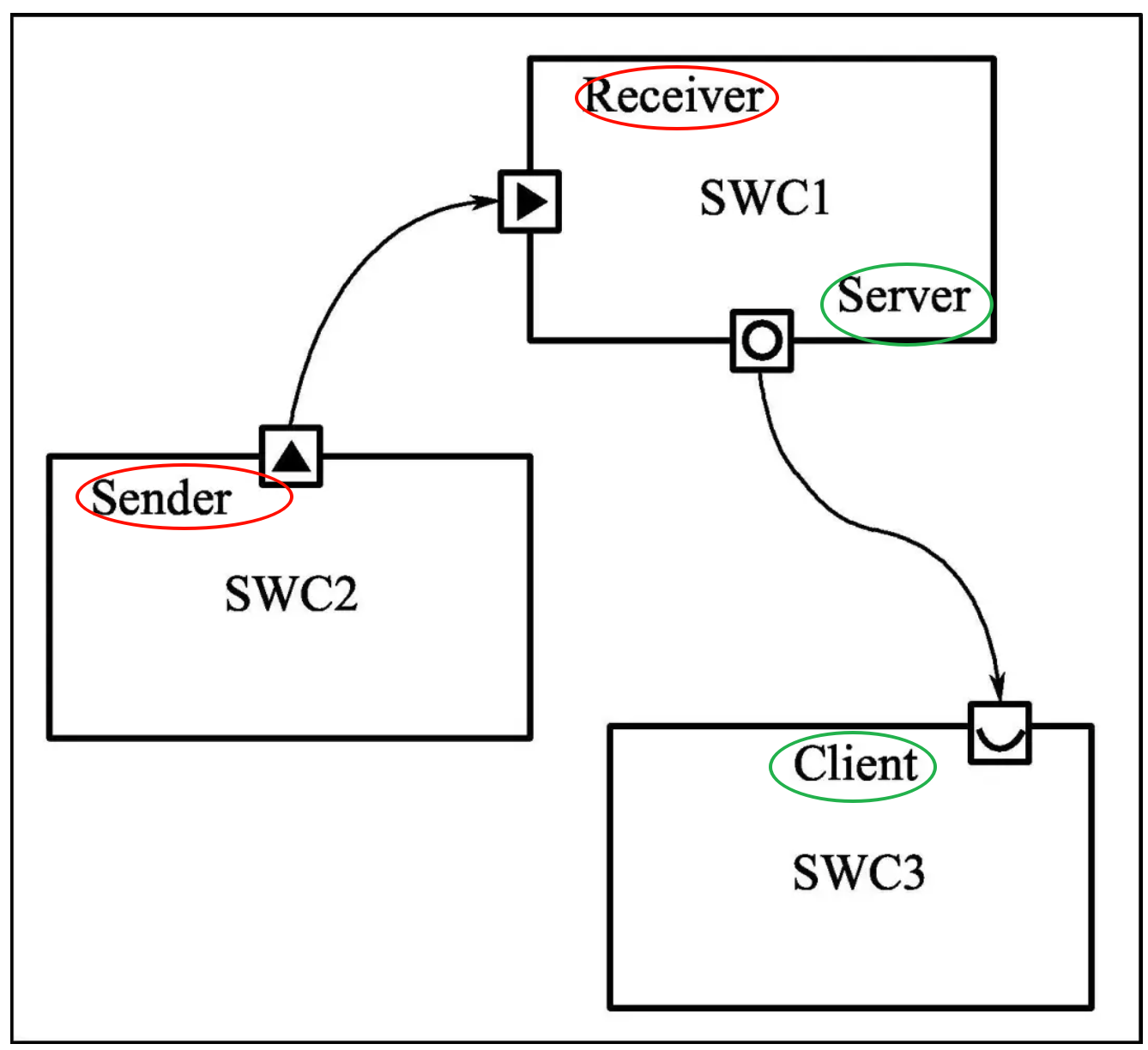
下面就拿这两个常用的端口接口来做进一步的了解。
对于发送者–接收者接口(Sender–Receiver Interface),其主要用于数据的传递,即可以一对多发,也可以多对一发。
该类型接口中定义了一系列的数据元素(Data Element,DE),并且彼此相互独立。如下图所示,该SR接口中定义了两个数据元素,名字为DE1和DE2,并且每个数据元素的数据类型各不相同。
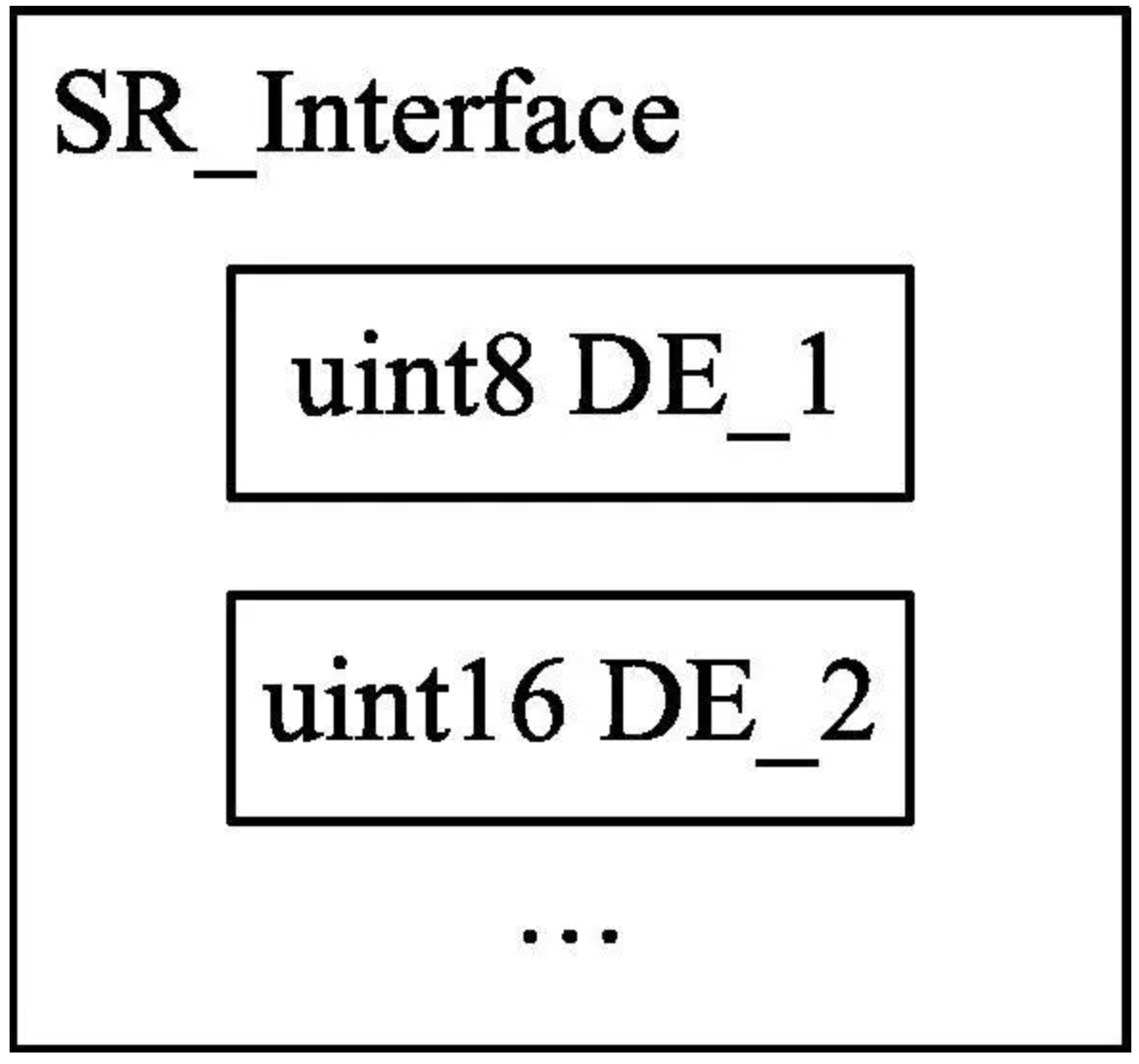
需要说明的是,一个软件组件的多个需型端口、供型端口、供需端口可以引用同一个发送者–接收者接口,并且它们可以使用该接口中所定义的任意一个或者多个数据元素,而不一定使用所有数据元素。
也就是说,对于一个接收者来说,它可以接收任意一个发送者端口中的任意个元素数据。这本质是上就是一个灵活的数据交换通道,非常类似于 CANOpen 中的 PDO 数据包格式,只需要配置好,就可以从通道上拿到自己想要的数据。
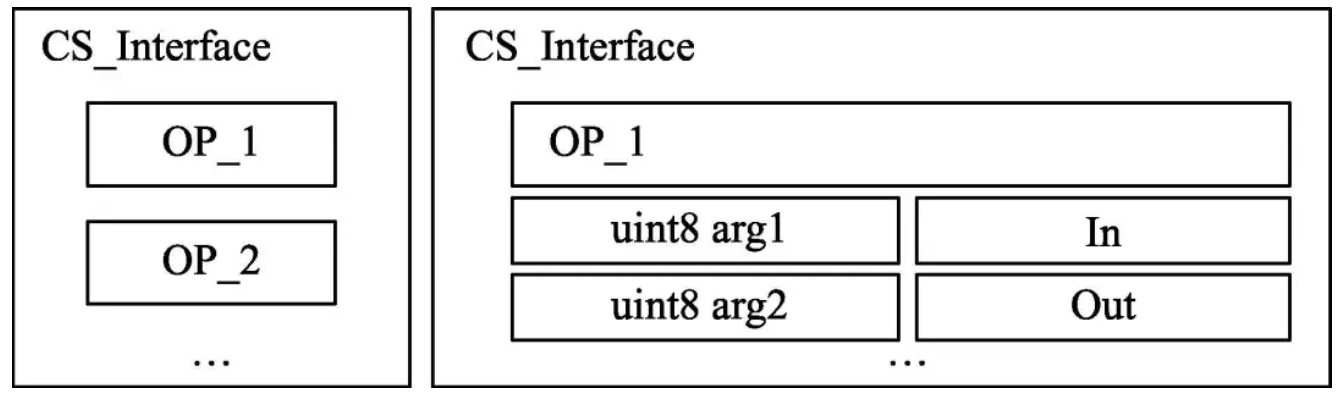
对于客户端–服务器接口(Client–Server Interface),其主要用于操作(Operation,OP)即函数调用关系,服务器是操作的提供者,多个客户端可以调用同一个操作,但同一客户端不能调用多个操作。
客户端(Client)主动发起一个请求(Request),然后等待服务器(Server)处理并返回一个响应(Response)。这是一个典型的请求-应答模式。
客户端–服务器接口定义了一系列操作函数,它们由引用该接口的供型端口所在的软件组件来实现,并提供给引用该接口的需型端口所在的软件组件调用。
下图展示了客户端–服务器接口定义的两个操作OP1和OP2,并对每个操作都定义了相关参数和方向,即函数的形参。
这里有一个注意的点,每一个端口只能被配置为一种端口类型,要么是发送接收模型,要么是服务客户模型,并且只有相同类型的端口才能通信。
端口的具体例子
我们以一个简单的汽车功能为例:控制车内阅读灯。
- 一个灯光控制器软件组件(LightControllerSWC):负责最终执行灯光的打开和关闭。
- 多个用户请求软件组件,例如:
- 车门软件组件(DoorSWC):车门打开时,请求打开阅读灯。
- 顶棚开关软件组件(OverheadSwitchSWC):用户手动按下开关,请求打开或关闭阅读灯。
- 车身域控制器(BCM):根据延时设置,请求关闭阅读灯。
我们看看使用 Sender-Receiver (SR) 接口
- 接口定义:
ILightStatus_IF - 数据元素 (DE):
DE_LightOnOffRequest:boolean(True=开, False=关)DE_LightDimmingLevel:uint8(0-100% 调光等级)
- 端口配置:
DoorSWC有一个 Sender端口P_DoorStatus,引用ILightStatus_IF接口。当车门打开时,它发送DE_LightOnOffRequest = True。它不关心谁会收到这个信号。OverheadSwitchSWC有一个 Sender端口P_SwitchStatus,引用ILightStatus_IF接口。当用户按下开关,它发送DE_LightOnOffRequest(在True/False间切换)。LightControllerSWC有一个 Receiver端口P_LightCommand,引用ILightStatus_IF接口。它被配置为接收来自P_DoorStatus和P_SwitchStatus的DE_LightOnOffRequest数据。它只关心“开关”这个数据,不关心“调光等级”,所以它只接收它需要的数据元素。- 数据流:多个Sender -> 一个Receiver。
LightControllerSWC会收到来自不同发送者的开关请求,它需要实现一些逻辑(例如:优先级仲裁)来决定最终执行哪个命令。
SR接口的本质:传递状态信息。就像在车上贴了一张便签(数据),谁需要看谁就去看一眼。发送者只负责贴便签,不负责确保有人看到。
再来看看 Client-Server (CS) 接口
- 接口定义:
ILightControl_IF - 操作 (OP):
OP_SetOnOff(IN OnOff: boolean): 无返回值。命令灯打开或关闭。OP_SetDimmingLevel(IN Level: uint8): 返回E_STATUS(成功/失败)。命令灯设置到特定亮度。
- 端口配置:
LightControllerSWC是服务的提供者,它有一个 Server端口P_LightServer,引用ILightControl_IF接口。它内部实现了OP_SetOnOff和OP_SetDimmingLevel这两个函数的具体逻辑(如驱动芯片、控制PWM输出等)。- 刚刚的
DoorSWC,OverheadSwitchSWC, 以及BCM都是服务的消费者,它们各自有一个 Client端口 (P_DoorClient,P_SwitchClient,P_BCMClient),都引用ILightControl_IF。 - 操作流:
- 车门打开时,
DoorSWC通过它的Client端口调用OP_SetOnOff(True)。这个调用请求被发送到LightControllerSWC的Server端口。 LightControllerSWC执行该操作,打开灯,然后流程结束(无返回值)。- 用户操作顶棚开关时,
OverheadSwitchSWC通过它的Client端口调用OP_SetDimmingLevel(50),请求设置50%的亮度。 LightControllerSWC执行操作,尝试设置亮度,然后返回一个状态码(如E_OK)给OverheadSwitchSWC。
CS接口的本质:执行远程命令。就像你(Client)打电话(调用)给餐厅(Server)点餐(操作),餐厅告诉你餐已做好(响应)。这是一个有明确交互和应答的过程。
如果做过 CANOpen,发现他们如出一辙,放在我们普通的通信中理解也很容易,这里就等于为不同的 SWC 组件建立了两种联系。
Component组件
Autosar中,在VFB 级构建系统时使用的中心结构元素是“组件”,Application就是由一个个组件组成。
组件有定义良好的“端口”,通过这些端口,该组件可以与其它组件交互。一个端口总是只属于一个组件,并表示一个组件与其他组件之间的交互点。
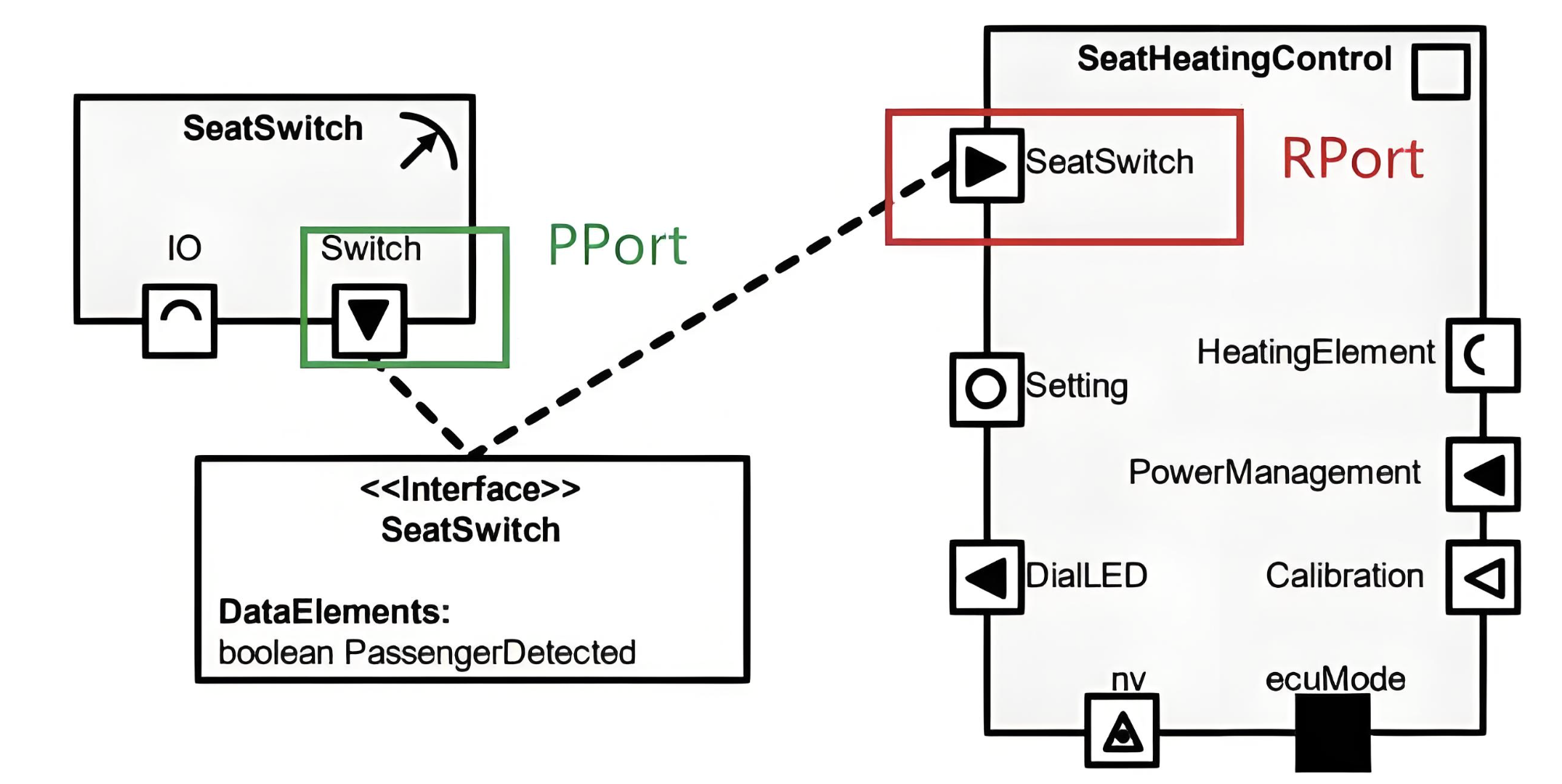
组件可以有多个端口,如下图,显示了一个“座椅加热控制”的组件类型的定义示例,该组件类型基于几个信息源控制座位上的加热元件。
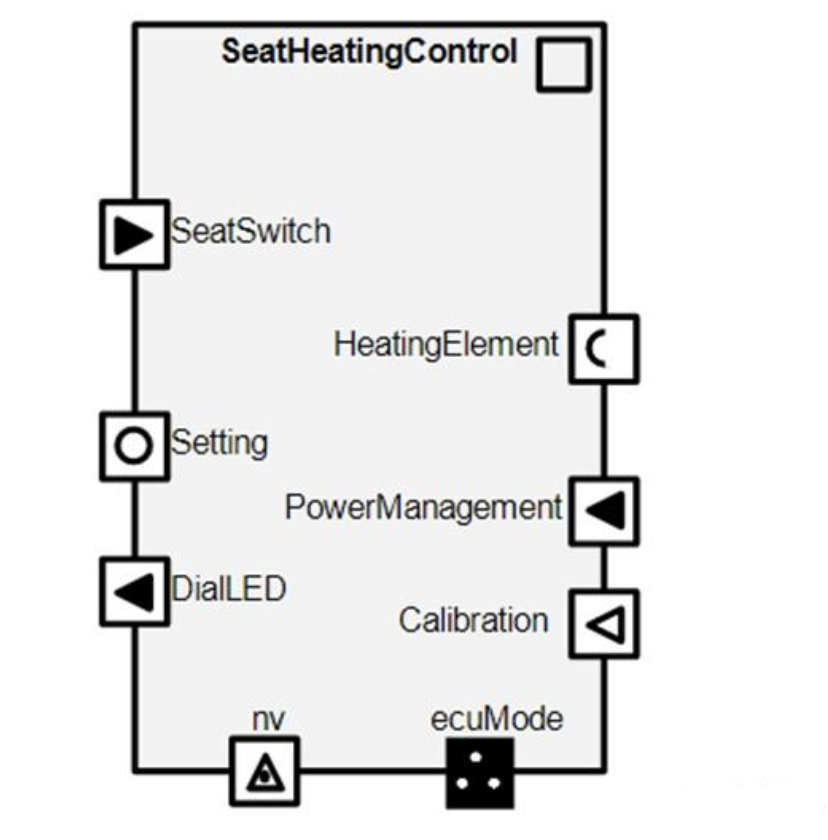
在上图中,组件类型需要以下信息作为输入:
- 乘客是否坐在座位上(通过端口“SeatSwitch”,S/R端口)
- 座位温度刻度盘的设置(通过端口“Setting”,C/S端口)
- 来自中央电源管理系统的一些信息(通过端口“PowerManagement”,S/R端口),这个系统可以在某些条件下禁用座位加热。
这个组件控制着如下信息:
- 与座椅温度相关的LED仪表盘。(通过端口“DialLED”,S/R端口)
- 加热电子元件(通过端口“HeatingElement”,C/S端口)
最后,组件可以校准(通过端口“Calibration”),需要组件运行所在ECU的状态(端口“ECU Mode”),并访问本地非易失存储器(“端口nv”)。
对于组件,Autosar还支持组件的多次实例化,比如可以把座椅加热组件,实例化为左前座椅加热,右前座椅加热,这里就非常具有面向对象编程中类的意思了,他方便我们定义一种组件,然后在实例化多个继承的子组件,我想,子组件肯定支持新增端口,来让不同的子组件可以实现独特功能。
Composition与原子组件
一个由多个组件和连接器组成的子系统被打包成一个“组合”。
构成组合的组件,被称作原型。一个组合本身就是一个组件类型,可以有自己的端口。组合可以作为结构元素来构建任意数量的层次系统。
以上类比我们在 AD 中画原理图时的多层级绘图机制,不能说完全相同,简直是一模一样。
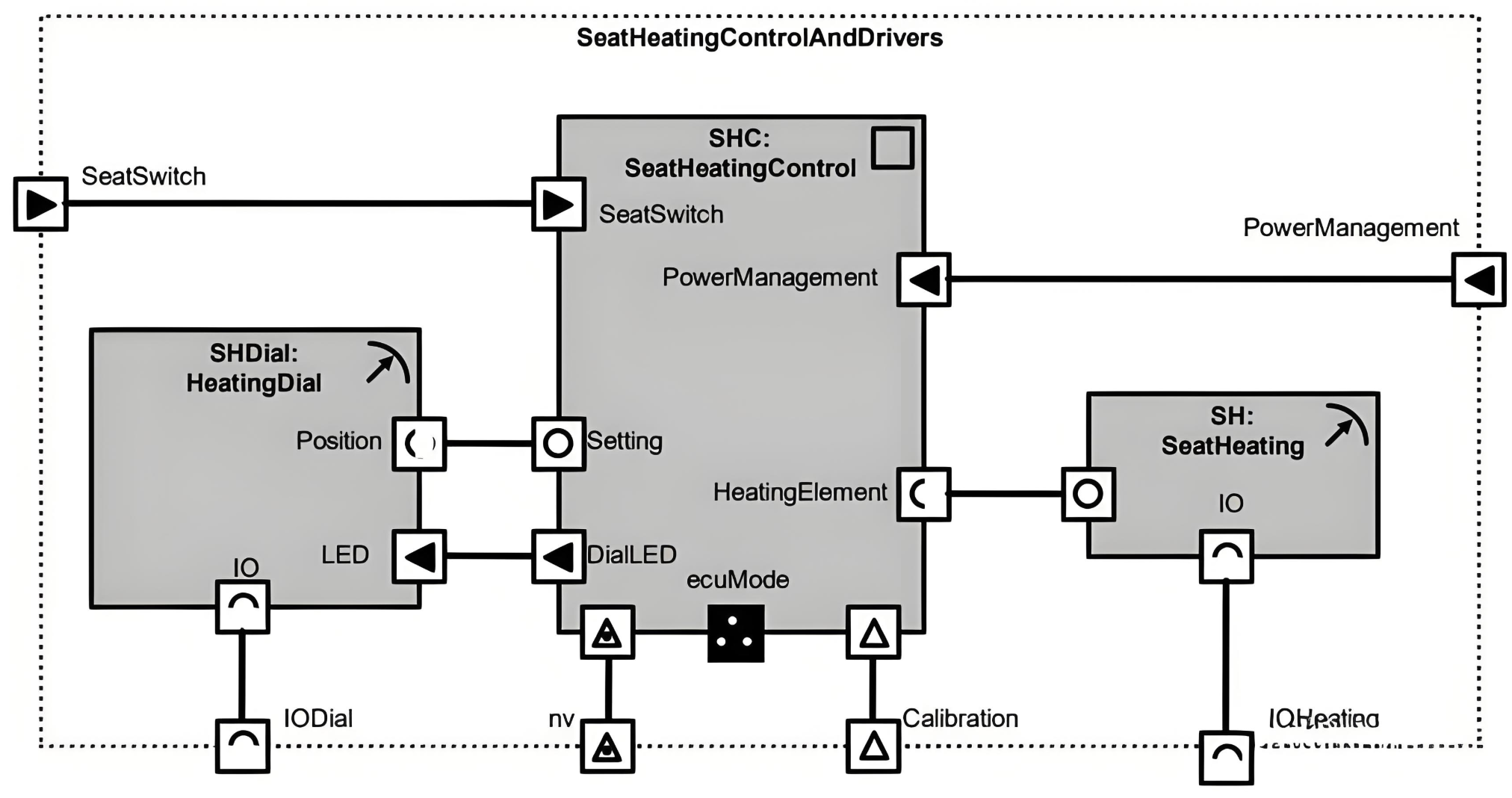
如下图,描述了组合“座椅加热控制与驱动”的定义。
这一组合包含三个原型:
- 原型“SHDial”(组件类型“加热刻度盘”)
- 原型“SHC”(组件类型“座椅加热控制”)
- 原型“SH”(组件类型“座椅加热”)
该组合本身是一个组件类型,有6个端口。
在AUTOSAR中,组件类型要么是“组合”,要么是“原子”。组合是通过相互连接的原子组件来定义的。原子组件不能进一步分解为更小的组件。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
没有相关内容!

暂无评论...